diff --git a/README.md b/README.md
index e595a5e120be88a366c659d9ab18b195b278ff42..8f19ef431a186dadd0d554795e6a3095eca9b643 100644
--- a/README.md
+++ b/README.md
@@ -24,14 +24,8 @@ This stepdriver is part of another project on networked machine control (I am ca
A-la [Mechaduino](http://tropical-labs.com/index.php/mechaduino) and many other solutions, this beckons to be mounted on the arse-side of the motor it is responsible for... that way, it looks neat, and we can just glue a magnet on the back of the shaft to read position with our encoder. In the future, I really want to also control NEMA8 and NEMA11 motors (because they're cute as heck) but for the immediate future NEMA17s are OK and I can always use a laser-cut adapter to mount the same board onto a NEMA23. OK, again, simplicity wins, we go for the NEMA17 board, but spec drivers to NEMA23 size.
-# Board Design
+# Currently
-OK, normally I get really longwinded about this. Not today! I drew *this* board after a major revision of another version using the TMC262 and some small P-and-NFET H-Bridges, which were a cool part, but obsoleted for me now that I discovered the TMC2660. Really should have looked harder for that.
+Working through firmware setup (and requisite firmware tools / libs for ATSAMD51, will be used on BLDC, etc). Nearly there!
-
-
-
-
-# Board Fab
-
-I had this manufactured, and got the solder stencil, so that just left me to place components and reflow. Somewhere along the way I royally screwed up my reflow profile. Next time I fab a set, I'll put an image here, and start the programming folder.
+
\ No newline at end of file
diff --git a/circuit/README.md b/circuit/README.md
new file mode 100644
index 0000000000000000000000000000000000000000..e8cf60184b38f6011fcd304bd1a981f624b08d85
--- /dev/null
+++ b/circuit/README.md
@@ -0,0 +1,13 @@
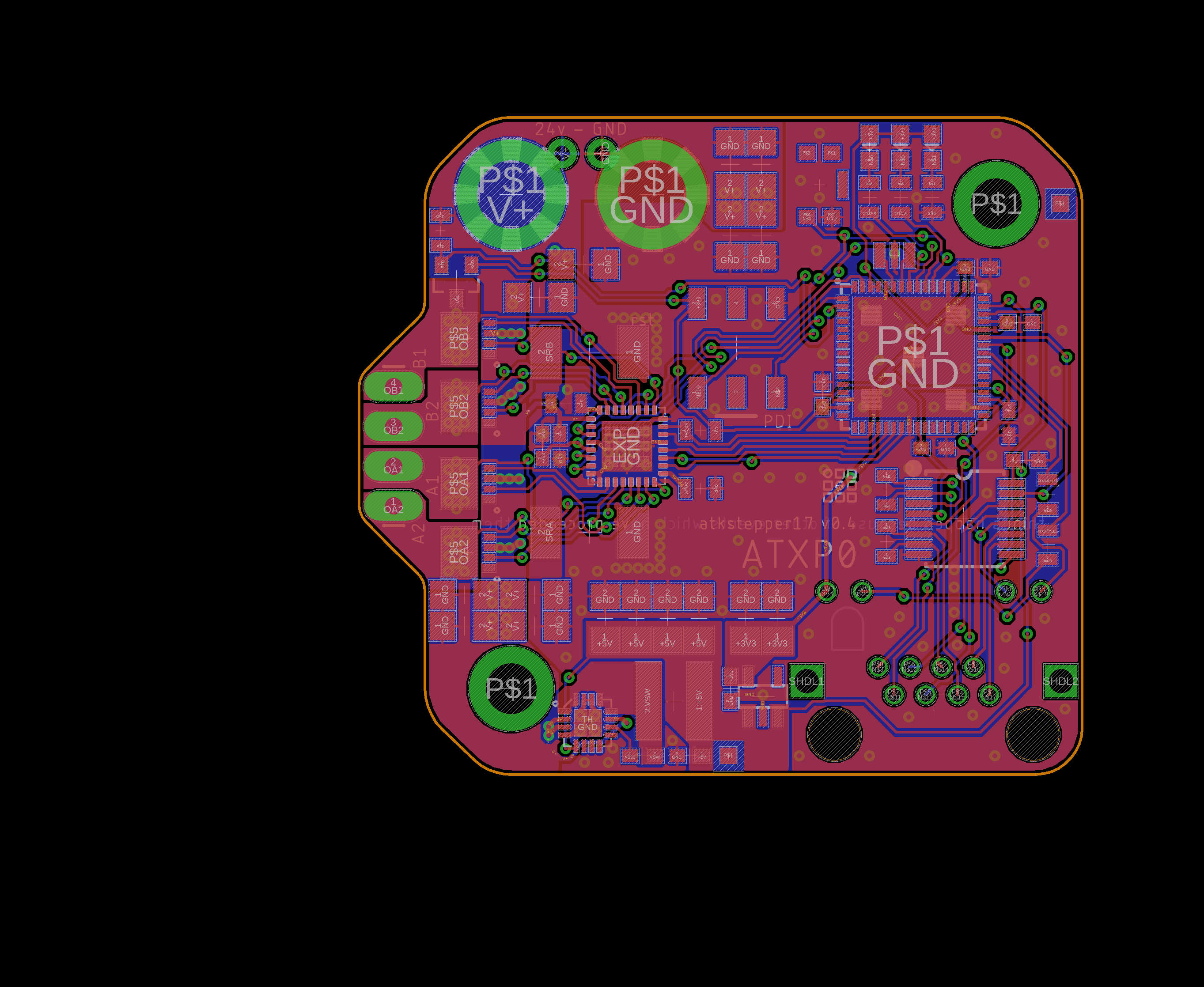
+# Board Design
+
+OK, normally I get really longwinded about this. Not today! I drew *this* board after a major revision of another version using the TMC262 and some small P-and-NFET H-Bridges, which were a cool part, but obsoleted for me now that I discovered the TMC2660. Really should have looked harder for that.
+
+
+
+
+
+# Board Fab
+
+I had this manufactured, and got the solder stencil, so that just left me to place components and reflow. Somewhere along the way I royally screwed up my reflow profile. Next time I fab a set, I'll put an image here, and start the programming folder.
+
+
\ No newline at end of file
diff --git a/circuit/mkstepper/eagle.epf b/circuit/mkstepper/eagle.epf
index d40b9de98a08535aebf4e8f775e7fb9a4948eef3..1a2929fd56818e5b0012a908c54d95e22901fd21 100644
--- a/circuit/mkstepper/eagle.epf
+++ b/circuit/mkstepper/eagle.epf
@@ -32,12 +32,6 @@ UsedLibrary="C:/EAGLE 8.3.2/lbr/ltspice/rload.lbr"
UsedLibrary="C:/EAGLE 8.3.2/lbr/ltspice/sym.lbr"
[Win_1]
-Type="Control Panel"
-Loc="0 0 1919 1016"
-State=1
-Number=0
-
-[Win_2]
Type="Board Editor"
Loc="0 0 1919 1016"
State=3
@@ -83,13 +77,13 @@ AddLevel=2
PadsSameType=0
Layer=16
-[Win_3]
+[Win_2]
Type="Schematic Editor"
-Loc="0 0 1919 1016"
+Loc="-1928 -8 -9 1008"
State=1
Number=1
File="mkstepper.sch"
-View="48.0247 158.394 176.435 240.944"
+View="37.2579 86.1909 222.169 205.063"
WireWidths=" 0.0762 0.1016 0.127 0.15 0.2 0.2032 0.254 0.3048 0.4064 0.508 0.6096 0.8128 1.016 1.27 2.54 0.1524"
PadDiameters=" 0.254 0.3048 0.4064 0.6096 0.8128 1.016 1.27 1.4224 1.6764 1.778 1.9304 2.1844 2.54 3.81 6.4516 0"
PadDrills=" 0.2 0.25 0.3 0.35 0.4 0.45 0.5 0.55 0.65 0.7 0.75 0.8 0.85 0.9 1 0.6"
@@ -128,9 +122,15 @@ ArcDirection=0
AddLevel=2
PadsSameType=0
Layer=91
-Views=" 1: 48.0247 158.394 176.435 240.944"
+Views=" 1: 37.2579 86.1909 222.169 205.063"
Sheet="1"
+[Win_3]
+Type="Control Panel"
+Loc="0 0 1919 1016"
+State=1
+Number=0
+
[Desktop]
Screen="3840 1080"
Window="Win_1"
diff --git a/embedded/README.md b/embedded/README.md
index 7ca92e990067c0d78eb48e58368a93b533405fd7..45fc919af907b6395ee8fb1b3d38a5538dff8031 100644
--- a/embedded/README.md
+++ b/embedded/README.md
@@ -308,14 +308,26 @@ void uart_txhandler(uartport_t *uart){
Next I'm going to try to get some steps to happen. I guess we're ready for this!
-I found [this](https://github.com/trinamic/TMC26XStepper) library.
+I found [this](https://github.com/trinamic/TMC26XStepper) library, which will save me from re-writing all of the registers and addresses. Bless.
-# the end of this day
+SPI commands and responses are all 20-bits long. Each 20-bit command is met with a 20-bit status word. Those 20-bit 'commands' are registers - the first three bits of each word denote the address of which register we are re-writing. This means that we have to keep track of each entire register-state in the microcontroller, or should.
-- dinner
-- tell anna you can't handle meeting b/c NSF
-- setup to be doing NSF only tomorrow
-- get whatever you can get done today
-- maybe kill / handle: dome ... anything else you feel is 'loose'
- - lots of emails
- - cleaning up
\ No newline at end of file
+Most likely, operation will consist of starting up with sending all 5 registers sequentially in the setup config, and then occasionally polling one to get the response (which, it looks like, contains useful things like relative loads!).
+
+Late on, when I try to make a closed loop stepper with the AS5147, I'll be writing coil currents directly into these registers (I think?) to commutate the motor based on encoder input and a tiny PID loop. That, later - but for now I see that in the DRVCTRL register has two 8-bit words for Current in A and Current in B. Noice.
+
+Another thing I like is that I can set both step edges to signify a step. Normally, step drivers have a 'minimum on time' and only count the positive edge, so the microcode has to do a tiny wait (normally not long enough to warrant an interrupt-to-turn-off). This way I'll just toggle the step pin whenever I want to step, and I can forget about it.
+
+So, first I'll try to figure out how to send a 20-bit word with the SPI peripheral, and verify that I get any kind of response from the TMC.
+
+The ATSAMD51 only allows an 8, 9, or 32 bit word, so 32 it is - I'll just keep the last 12 set to 0 and hope that suffices.
+
+OK, here's a classic debugging moment: I take ~45 minutes (or was it two hours? would rather not count) trying to get my SPI setup correctly. Nothing returns. Welp. I pull my hair out. I take a break, decide to plug in some motor power, because why not? Of course, now, data returns. Heck.
+
+To solve that 20-bit word problem, I'm taking over manual control of the chip select pin, issuing 3 8-bit words (which I'll have to bit-splice myself) and then sending those on one CSN low cycle.
+
+Great, now we unfux the hacked together code, and try to send some data, then some steps, I guess?
+
+I think I'm actually going to try writing this library from the datasheet. Let's see how that goes.
+
+Er, how about we just write some values down manually and send those? Sounds good.
\ No newline at end of file
diff --git a/embedded/mkstepper-v011/.vs/mkstepper-v011/v14/.atsuo b/embedded/mkstepper-v011/.vs/mkstepper-v011/v14/.atsuo
index b14b68e3dd1cd02342db41b3d6c09b1e92b2ab3d..c07e4635da7580fbeaa3150c81ae549f11bceb7d 100644
Binary files a/embedded/mkstepper-v011/.vs/mkstepper-v011/v14/.atsuo and b/embedded/mkstepper-v011/.vs/mkstepper-v011/v14/.atsuo differ
diff --git a/embedded/mkstepper-v011/mkstepper-v011/Debug/Makefile b/embedded/mkstepper-v011/mkstepper-v011/Debug/Makefile
index 7d21dd26e9fed5522a9bceb34794fbf12d185169..dcfb0ff20c80a840272fbda62995bac462a99369 100644
--- a/embedded/mkstepper-v011/mkstepper-v011/Debug/Makefile
+++ b/embedded/mkstepper-v011/mkstepper-v011/Debug/Makefile
@@ -44,6 +44,7 @@ C_SRCS += \
../pin.c \
../ringbuffer.c \
../spiport.c \
+../tmc2660.c \
../uartport.c
@@ -60,6 +61,7 @@ main.o \
pin.o \
ringbuffer.o \
spiport.o \
+tmc2660.o \
uartport.o
OBJS_AS_ARGS += \
@@ -69,6 +71,7 @@ main.o \
pin.o \
ringbuffer.o \
spiport.o \
+tmc2660.o \
uartport.o
C_DEPS += \
@@ -78,6 +81,7 @@ main.d \
pin.d \
ringbuffer.d \
spiport.d \
+tmc2660.d \
uartport.d
C_DEPS_AS_ARGS += \
@@ -87,6 +91,7 @@ main.d \
pin.d \
ringbuffer.d \
spiport.d \
+tmc2660.d \
uartport.d
OUTPUT_FILE_PATH +=mkstepper-v011.elf
@@ -120,6 +125,8 @@ LINKER_SCRIPT_DEP+= \
+
+
Device_Startup/%.o: ../Device_Startup/%.c
@echo Building file: $<
@echo Invoking: ARM/GNU C Compiler : 6.3.1
diff --git a/embedded/mkstepper-v011/mkstepper-v011/Debug/makedep.mk b/embedded/mkstepper-v011/mkstepper-v011/Debug/makedep.mk
index bd15a2469d53d98789bff4058882d0f7bb3b206d..72ec45f8addabeaabf32c2f925395d9b88a919b0 100644
--- a/embedded/mkstepper-v011/mkstepper-v011/Debug/makedep.mk
+++ b/embedded/mkstepper-v011/mkstepper-v011/Debug/makedep.mk
@@ -14,5 +14,7 @@ ringbuffer.c
spiport.c
+tmc2660.c
+
uartport.c
diff --git a/embedded/mkstepper-v011/mkstepper-v011/hardware.h b/embedded/mkstepper-v011/mkstepper-v011/hardware.h
index ad2481e0014308b57205b60a8d89f920d20738cd..7d369f2ae65c2c1d12704a1c079bb0bb746d8a96 100644
--- a/embedded/mkstepper-v011/mkstepper-v011/hardware.h
+++ b/embedded/mkstepper-v011/mkstepper-v011/hardware.h
@@ -13,6 +13,7 @@
#include "uartport.h"
#include "spiport.h"
#include "ringbuffer.h"
+#include "tmc2660.h"
pin_t stlr;
pin_t stlb;
@@ -27,4 +28,11 @@ uartport_t up2;
spiport_t spi_tmc;
+pin_t step_pin;
+pin_t dir_pin;
+pin_t en_pin;
+pin_t sg_pin;
+
+tmc2260_t tmc;
+
#endif /* HARDWARE_H_ */
\ No newline at end of file
diff --git a/embedded/mkstepper-v011/mkstepper-v011/main.c b/embedded/mkstepper-v011/mkstepper-v011/main.c
index c68636a84cc8906fb0da2de391f466458b1702fc..6e4553574414df6005e1d68164738cf072904471 100644
--- a/embedded/mkstepper-v011/mkstepper-v011/main.c
+++ b/embedded/mkstepper-v011/mkstepper-v011/main.c
@@ -125,13 +125,29 @@ int main(void)
// spi
spi_tmc = spi_new(SERCOM0, &PORT->Group[0], 4, 7, 5, 6, HARDWARE_IS_APBA, HARDWARE_ON_PERIPHERAL_D);
MCLK->APBAMASK.reg |= MCLK_APBAMASK_SERCOM0;
- spi_init(&spi_tmc, 8, SERCOM0_GCLK_ID_CORE, 126, 0, 2);
-
- // -> DO SPI, talk to the TMC !
-
+ spi_init(&spi_tmc, 8, SERCOM0_GCLK_ID_CORE, 126, 0, 2, 0, 0, 1, 0);
+
+ // TMC
+ // STEP PB08
+ // DIR PB09
+ // EN PB07
+ // SG PB06
+
+ step_pin = pin_new(&PORT->Group[1], 8);
+ dir_pin = pin_new(&PORT->Group[1], 9);
+ en_pin = pin_new(&PORT->Group[1], 7);
+ sg_pin = pin_new(&PORT->Group[1], 6);
+
+ tmc = tmc2660_new(&spi_tmc, &step_pin, &dir_pin, &en_pin, &sg_pin);
+ tmc2660_init(&tmc);
+
while (1)
{
- // spi_txchar_polled(&spitmc, 'x');
+ tmc2660_init(&tmc);
+ // delay
+ for(int i=0; i < 500; i++){
+ pin_toggle(&stlr);
+ }
// find TMC registers now, try to read!
}
diff --git a/embedded/mkstepper-v011/mkstepper-v011/mkstepper-v011.cproj b/embedded/mkstepper-v011/mkstepper-v011/mkstepper-v011.cproj
index 0f4e9d1b7a328cf1558fde1d1588409ef956d570..1c7366ff6e0a0fcd327d5e89c4cd2337c5b4f89c 100644
--- a/embedded/mkstepper-v011/mkstepper-v011/mkstepper-v011.cproj
+++ b/embedded/mkstepper-v011/mkstepper-v011/mkstepper-v011.cproj
@@ -190,6 +190,12 @@
<Compile Include="spiport.h">
<SubType>compile</SubType>
</Compile>
+ <Compile Include="tmc2660.c">
+ <SubType>compile</SubType>
+ </Compile>
+ <Compile Include="tmc2660.h">
+ <SubType>compile</SubType>
+ </Compile>
<Compile Include="uartport.c">
<SubType>compile</SubType>
</Compile>
diff --git a/embedded/mkstepper-v011/mkstepper-v011/spiport.c b/embedded/mkstepper-v011/mkstepper-v011/spiport.c
index 8fe8b5615f2cc94ccaeb6af2793ee4b98a2f1078..a291180c545e9da0050870125a457b844b669cd6 100644
--- a/embedded/mkstepper-v011/mkstepper-v011/spiport.c
+++ b/embedded/mkstepper-v011/mkstepper-v011/spiport.c
@@ -28,7 +28,8 @@ spiport_t spi_new(Sercom *com, PortGroup *port, uint32_t miso_pin, uint32_t mosi
return spi;
}
-void spi_init(spiport_t *spi, uint32_t gclknum, uint32_t gclkidcore, uint8_t baud, uint32_t dipo, uint32_t dopo){
+void spi_init(spiport_t *spi, uint32_t gclknum, uint32_t gclkidcore, uint8_t baud, uint8_t dipo, uint8_t dopo, uint8_t csnhardware, uint8_t cpha, uint8_t cpol, uint8_t lsbfirst){
+ // to add to this lib: doc, cleaning, options properly enumerated: do when doing AS5147
// clk is unmasked (external to this lib)
// do pin configs
spi->port->DIRCLR.reg |= spi->miso_bm;
@@ -36,7 +37,17 @@ void spi_init(spiport_t *spi, uint32_t gclknum, uint32_t gclkidcore, uint8_t bau
spi->port->DIRSET.reg |= spi->mosi_bm | spi->sck_bm | spi->csn_bm;
spi->port->PINCFG[spi->mosi_pin].bit.PMUXEN = 1;
spi->port->PINCFG[spi->sck_pin].bit.PMUXEN = 1;
- spi->port->PINCFG[spi->csn_pin].bit.PMUXEN = 1;
+
+ if(csnhardware){
+ spi->port->PINCFG[spi->csn_pin].bit.PMUXEN = 1;
+ if(spi->csn_pin % 2){ // yes if odd
+ spi->port->PMUX[spi->csn_pin >> 1].reg |= PORT_PMUX_PMUXO(spi->peripheral);
+ } else {
+ spi->port->PMUX[spi->csn_pin >> 1].reg |= PORT_PMUX_PMUXE(spi->peripheral);
+ }
+ }else{
+ spi->port->OUTSET.reg = spi->csn_bm; // set hi to start! - this should properly depend on our CPHA !
+ }
if(spi->miso_pin % 2){ // yes if odd
spi->port->PMUX[spi->miso_pin >> 1].reg |= PORT_PMUX_PMUXO(spi->peripheral);
@@ -56,31 +67,39 @@ void spi_init(spiport_t *spi, uint32_t gclknum, uint32_t gclkidcore, uint8_t bau
spi->port->PMUX[spi->sck_pin >> 1].reg |= PORT_PMUX_PMUXE(spi->peripheral);
}
- if(spi->csn_pin % 2){ // yes if odd
- spi->port->PMUX[spi->csn_pin >> 1].reg |= PORT_PMUX_PMUXO(spi->peripheral);
- } else {
- spi->port->PMUX[spi->csn_pin >> 1].reg |= PORT_PMUX_PMUXE(spi->peripheral);
- }
-
// build a clock for
GCLK->GENCTRL[gclknum].reg = GCLK_GENCTRL_SRC(GCLK_GENCTRL_SRC_DFLL) | GCLK_GENCTRL_GENEN;
while(GCLK->SYNCBUSY.reg & GCLK_SYNCBUSY_GENCTRL(gclknum));
GCLK->PCHCTRL[gclkidcore].reg = GCLK_PCHCTRL_CHEN | GCLK_PCHCTRL_GEN(gclknum);
// now some SERCOM
+ // tmc spi is clock inactive hi
+ // tmc spi latches data on the rising edge of sck and drives data out on the next falling edge
spi->com->SPI.CTRLA.bit.ENABLE = 0;
// master, data in pinout, data out pinout
spi->com->SPI.CTRLA.reg |= SERCOM_SPI_CTRLA_MODE(0x03);
- //SERCOM0->SPI.CTRLA.reg |= SERCOM_SPI_CTRLA_CPHA | SERCOM_SPI_CTRLA_CPOL;
+ if(cpol){
+ spi->com->SPI.CTRLA.reg |= SERCOM_SPI_CTRLA_CPOL;
+ }
+ if(cpha){
+ spi->com->SPI.CTRLA.reg |= SERCOM_SPI_CTRLA_CPHA;
+ }
+ if(lsbfirst){
+ SERCOM0->SPI.CTRLA.reg |= SERCOM_SPI_CTRLA_DORD; // 0 MSB, 1 LSB
+ }
spi->com->SPI.CTRLA.reg |= SERCOM_SPI_CTRLA_DIPO(dipo) | SERCOM_SPI_CTRLA_DOPO(dopo);
// these to defaults, but here for show
- //SERCOM0->SPI.CTRLA.reg |= SERCOM_SPI_CTRLA_DORD; // 0 MSB, 1 LSB
//SERCOM0->SPI.CTRLB.reg |= SERCOM_SPI_CTRLB_CHSIZE(0x0); // 8 bits character - 0x0, so no need to set
// BAUD
// f_baud = f_ref / (2 * (BAUD +1)) so BAUD = f_ref / (2 * f_baud) - 1
spi->com->SPI.BAUD.reg |= SERCOM_SPI_BAUD_BAUD(baud);
// use hardware slave select, enable receiver
- spi->com->SPI.CTRLB.reg |= SERCOM_SPI_CTRLB_MSSEN | SERCOM_SPI_CTRLB_RXEN;
+ spi->com->SPI.CTRLB.reg |= SERCOM_SPI_CTRLB_RXEN; //SERCOM_SPI_CTRLB_MSSEN |
+ // 8 or 32 bits
+ // do if(bits)
+ //spi->com->SPI.CTRLC.reg |= SERCOM_SPI_CTRLC_DATA32B;
+ //spi->com->SPI.LENGTH.reg |= SERCOM_SPI_LENGTH_LENEN | SERCOM_SPI_LENGTH_LEN(20);
+
// turnt it up
spi->com->SPI.CTRLA.bit.ENABLE = 1;
}
@@ -90,6 +109,15 @@ void spi_txchar_polled(spiport_t *spi, uint8_t data){
spi->com->SPI.DATA.reg = SERCOM_SPI_DATA_DATA(data);
}
+void spi_txchars_polled(spiport_t *spi, uint8_t *data, uint8_t length){
+ spi->port->OUTCLR.reg = spi->csn_bm;
+ for(int i = 0; i < length; i ++){
+ spi_txchar_polled(spi, data[0]);
+ }
+ while(!spi->com->SPI.INTFLAG.bit.TXC); // wait for complete before
+ spi->port->OUTSET.reg = spi->csn_bm;
+}
+
void spi_txrxchar_polled(spiport_t *spi, uint8_t data, uint8_t *rxdata){
// how to read?
}
\ No newline at end of file
diff --git a/embedded/mkstepper-v011/mkstepper-v011/spiport.h b/embedded/mkstepper-v011/mkstepper-v011/spiport.h
index c433d455c67762125889c83fa82d3700d0326642..d4ac77554e0a8ff4121a40302dde67619c4cae83 100644
--- a/embedded/mkstepper-v011/mkstepper-v011/spiport.h
+++ b/embedded/mkstepper-v011/mkstepper-v011/spiport.h
@@ -31,8 +31,10 @@ typedef struct{
spiport_t spi_new(Sercom *com, PortGroup *port, uint32_t miso_pin, uint32_t mosi_pin, uint32_t sck_pin, uint32_t csn_pin, uint32_t apbx, uint32_t peripheral);
-void spi_init(spiport_t *spi, uint32_t gclknum, uint32_t gclkidcore, uint8_t baud, uint32_t dipo, uint32_t dopo);
+void spi_init(spiport_t *spi, uint32_t gclknum, uint32_t gclkidcore, uint8_t baud, uint8_t dipo, uint8_t dopo, uint8_t csnhardware, uint8_t cpha, uint8_t cpol, uint8_t lsbfirst); // bits: 0: 8, 1: 32
+
void spi_txchar_polled(spiport_t *spi, uint8_t data);
+void spi_txchars_polled(spiport_t *spi, uint8_t *data, uint8_t length);
void spi_txrxchar_polled(spiport_t *spi, uint8_t data, uint8_t *rxdata);
#endif /* SPIPORT_H_ */
\ No newline at end of file
diff --git a/embedded/mkstepper-v011/mkstepper-v011/tmc2660.c b/embedded/mkstepper-v011/mkstepper-v011/tmc2660.c
new file mode 100644
index 0000000000000000000000000000000000000000..5a883f02a1eb32f721e91ca0c9b99ea2530283f5
--- /dev/null
+++ b/embedded/mkstepper-v011/mkstepper-v011/tmc2660.c
@@ -0,0 +1,29 @@
+/*
+ * tmc2660.c
+ *
+ * Created: 2/7/2018 10:17:39 PM
+ * Author: Jake
+ */
+
+#include "tmc2660.h"
+
+tmc2260_t tmc2660_new(spiport_t *spi, pin_t *step, pin_t *dir, pin_t *en, pin_t *sg){
+ tmc2260_t tmc;
+
+ tmc.spi = spi;
+ tmc.step_pin = step;
+ tmc.dir_pin = dir;
+ tmc.en_pin = en;
+ tmc.sg_pin = sg;
+
+ return tmc;
+}
+
+void tmc2660_init(tmc2260_t *tmc){
+ // lots
+ // pins are also init externally
+ // spi is init externally, godbless
+ uint8_t data[3] = {8, 9, 10};
+ spi_txchars_polled(tmc->spi, data, 3);
+}
+
diff --git a/embedded/mkstepper-v011/mkstepper-v011/tmc2660.h b/embedded/mkstepper-v011/mkstepper-v011/tmc2660.h
new file mode 100644
index 0000000000000000000000000000000000000000..0025e10c66ea2e5192957959dac0f129456b4e7a
--- /dev/null
+++ b/embedded/mkstepper-v011/mkstepper-v011/tmc2660.h
@@ -0,0 +1,32 @@
+/*
+ * tmc2660.h
+ *
+ * Created: 2/7/2018 10:17:49 PM
+ * Author: Jake
+ */
+
+
+#ifndef TMC2660_H_
+#define TMC2660_H_
+
+#include "sam.h"
+#include "spiport.h"
+#include "pin.h"
+
+typedef struct{
+ spiport_t *spi;
+
+ pin_t *step_pin;
+ pin_t *dir_pin;
+ pin_t *en_pin;
+
+ pin_t *sg_pin;
+}tmc2260_t;
+
+tmc2260_t tmc2660_new(spiport_t *spi, pin_t *step, pin_t *dir, pin_t *en, pin_t *sg);
+
+void tmc2660_init(tmc2260_t *tmc);
+
+void tmc2660_step_once(tmc2260_t *tmc, uint8_t dir);
+
+#endif /* TMC2660_H_ */
\ No newline at end of file
diff --git a/images/fabbed-v011.jpg b/images/fabbed-v011.jpg
new file mode 100644
index 0000000000000000000000000000000000000000..49b1ad4a496e5257accda7833fcbbf29b0459553
Binary files /dev/null and b/images/fabbed-v011.jpg differ