Select Git revision
-
Amira Abdel-Rahman authoredAmira Abdel-Rahman authored

README.md 7.96 KiB
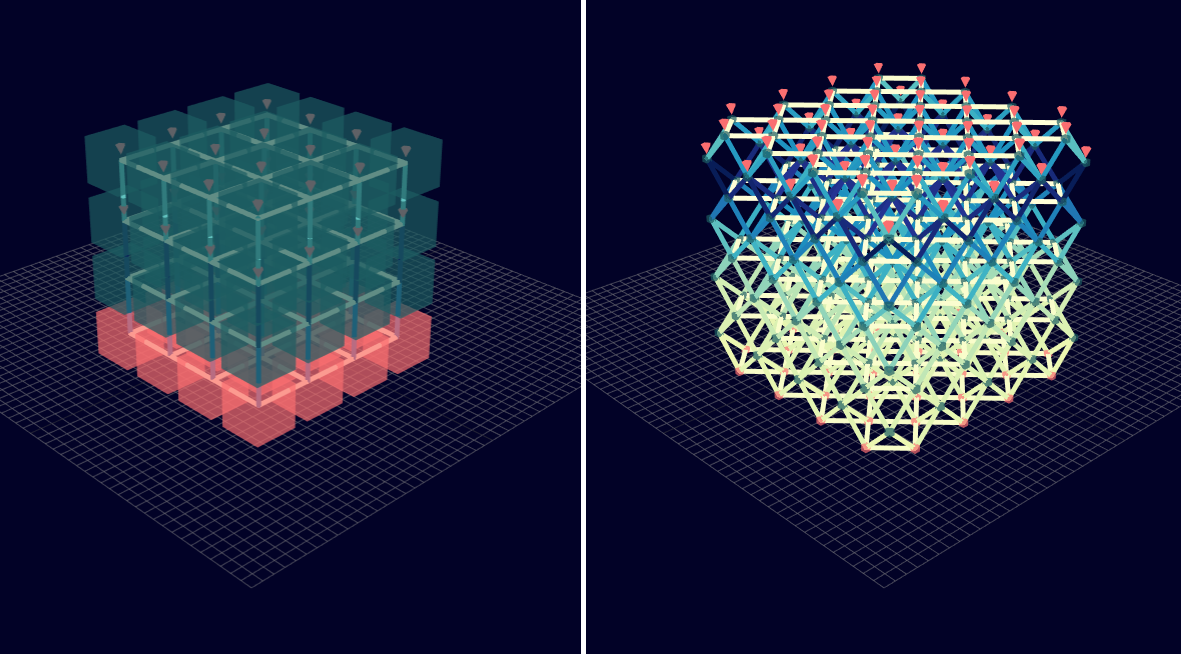
MetaVoxels
Tools for the design and simulation of metavoxels (meta-material voxel lattice structures). The objective is the inverse design of metavoxels using the base voxels studied in DM3.
I am now using this gitlab project for documentation only, the code lives here now.

Code
- Code Project: https://gitlab.cba.mit.edu/amiraa/metavoxels-code
- Installation and Code Structure
- GPU Parallelization and Scaling
Physics
- Structural Mechanics Model
- Validation and Convergence
- Non-linear Deformation and Thermal Expansion
- Hierarchy
- Fluid Solid Interaction
Search
Robotics
Assembly
Interactive Demos
- Tendons Modeling
- Rover
- Precomputed 5*5 cuboct Voxel
- Precomputed 4*1 chiral Voxel
- Boundary Conditions
- Hierarchal multi-material 3*3 Base Voxel (old cpu version (to fix))
TODO
Desired Milestones
- 3D visualization tool
- One voxel simulation
- Multi-voxel simulation
- Physical simulation comparison
- Parallel dynamic ODE solver
- Hierarchical simulation
- One voxel optimization based on desired deformation
- Inverse Design of Large Structures
- Inverse Design of Active structures (offline and online)
- Growing and Evolving structures (Path planing + simulation)
General
-
fix pipeline issue
- create group for metavoxel
- port the code to different project
- Merge metavoxel with dice stuff??
- Debug code to use latest julia and CUDA pkg
- clean the files and put app.js and app1.js and julia notebooks in folders
Documentation
-
get the video you created and add it instead of gifs
- make sure the codec information is correct
- Document cpu version and how to change the number of threads
Demos
-
different kinds of voxels
- add chiral voxel
- add auxetic voxel
- add compliant voxel
- search for one way bendy voxel
- Demo and .gif different types of voxels beside each other
-
fill mesh/frep with voxels
-
port swarm paper asd (voxelizer)
- parallelize it
-
fill frep
- get the gpu thing and get data from function
-
port swarm paper asd (voxelizer)
- fix linked demos
- populate interactive demos
- drop down examples from html instead of saving lots of html pages
Scaling and Hierarchy
-
comparison hierarchical vs detailed
- madcat
- automatic elasticity vector calculation
- use parent data to get hierarchy information
- different scale voxels in the same simulation (multi-scale simulation)
Interface and visualization
- change export settings instead of lost of json to only one and see performance
-
change visualization to GPU to be faster for bigger systems
-
graph based
- show the labels
-
gpu based
- finish implementation
- fixed max num of timesteps
-
graph based
- see way to show current timestep
- slider down for displacement instead of animation
-
gui for boundary conditions
- basic boxes
- export to json
-
CMODS
- finish implementation
- node from the browser
-
show force function between nodes
- force graph
- show control graph
- change to white background
Differentiation and Search
- Redo the microstructure topology optimization
- use the compliant one to search for one way bendy structure
-
differentiation
- inverse matrix forward methods/parameter estimation
- adjoint linear solve
- ensemble methods
- other
Physics
- change recommended time-step to look at all lengths, E and areas
- Non linear behavior get the stress strain curve multiple points and use them
- add collision/bins
- add note about units
-
add detailed parametric study about the different values that can be changed and effect on convergence and num time steps
- for ex: damping factor, stiffness, mass, time steps
- Explore double beams
- Add definitions for other beam cross sections
- include other integrators (better than verlet integration)